
4.3.1: Matrices
- Page ID
- 226990

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)The symmetry of molecules is essential for understanding the structures and properties of organic and inorganic compounds. The properties of chemical compounds are often easily explained by consideration of symmetry. For example, the symmetry of a molecule determines whether the molecule has a permanent dipole moment or not. The theories that describe optical activity, infrared and ultraviolet spectroscopy, and crystal structure involve the application of symmetry considerations. Matrix algebra is the most important mathematical tool in the description of symmetry.
The properties of symmetry groups are organized in character tables (discussed later in this chapter). Character tables are constructed based on matrices. This page is a brief description of matrices and matrix multiplication.
What is a matrix?
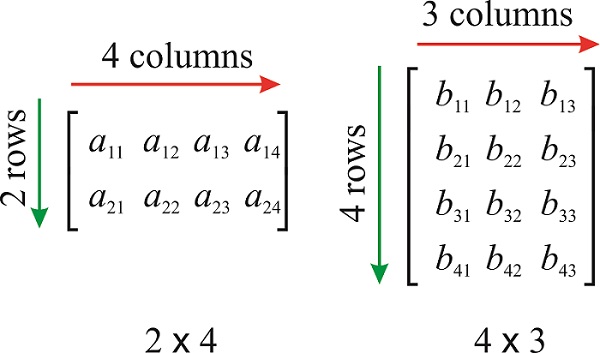
An \(m\times n\) matrix \(\mathbf{A}\) is a rectangular array of numbers with \(m\) rows and \(n\) columns. The numbers \(m\) and \(n\) are the dimensions of \(\mathbf{A}\). The numbers in the matrix are called its entries. The entry in row \(i\) and column \(j\) is called \(a_{ij}\).
Some types of matrices have special names:
- A square matrix:\[\begin{pmatrix} 3 &-2 &4 \\ 5 &3i &3 \\ -i & 1/2 &9 \end{pmatrix} \nonumber \] with \(m=n\)
- A rectangular matrix:\[\begin{pmatrix} 3 &-2 &4 \\ 5 &3i &3 \end{pmatrix}\nonumber \] with \(m\neq n\)
- A column vector:\[\begin{pmatrix} 3 \\ 5\\ -i \end{pmatrix}\nonumber \] with \(n=1\)
- A row vector:\[\begin{pmatrix} 3 &-2 &4 \\ \end{pmatrix}\nonumber \] with \(m=1\)
- The identity matrix:\[\begin{pmatrix} 1 &0 &0 \\ 0 &1 &0 \\ 0&0 &1 \end{pmatrix}\nonumber \] with \(a_{ij}=\delta_{i,j}\), where \(\delta_{i,j}\) is a function defined as \(\delta_{i,j}=1\) if \(i=j\) and \(\delta_{i,j}=0\) if \(i\neq j\).
- A diagonal matrix:\[\begin{pmatrix} a &0 &0 \\ 0 &b &0 \\ 0&0 &c \end{pmatrix}\nonumber \] with \(a_{ij}=c_i \delta_{i,j}\).
- An upper triangular matrix:\[\begin{pmatrix} a &b &c \\ 0 &d &e \\ 0&0 &f \end{pmatrix}\nonumber \] All the entries below the main diagonal are zero.
- A lower triangular matrix:\[\begin{pmatrix} a &0 &0 \\ b &c &0 \\ d&e &f \end{pmatrix}\nonumber \] All the entries above the main diagonal are zero.
- A triangular matrix is one that is either lower triangular or upper triangular.
The Trace of a Matrix
The trace of an \(n\times n\) square matrix \(\mathbf{A}\) is the sum of the diagonal elements, and formally defined as \(Tr( \mathbf{A})=\sum_{i=1}^{n}a_{ii}\).
For example,
\[\mathbf{A}=\begin{pmatrix} 3 &-2 &4 \\ 5 &3i &3 \\ -i & 1/2 &9 \end{pmatrix}\; ; Tr(\mathbf{A})=12+3i \nonumber \]
Singular and Nonsingular Matrices
A square matrix with nonzero determinant is called nonsingular. A matrix whose determinant is zero is called singular. (Note that you cannot calculate the determinant of a non-square matrix).
For a 2x2 matrix,
\[\mathbf{B}=\begin{pmatrix} a & b \\ c & d \end{pmatrix}\; ; det(\mathbf{B})= ad - cb \nonumber \]
For a 3x3 matrix,
\[\mathbf{C}=\begin{pmatrix} a & b & c \\ d & e & f \\ g & h & i \end{pmatrix} \nonumber \]
\[det(\mathbf{C})=a\begin{pmatrix} e & f \\ h & i \end{pmatrix} - b\begin{pmatrix} d & f \\ g & i \end{pmatrix} + c\begin{pmatrix} d & e \\ g & h \end{pmatrix} \nonumber \]
\[det(\mathbf{C})= aei - ahf -bdi + bgf + cdh - cge \nonumber \]
The Matrix Transpose
The matrix transpose, most commonly written \(\mathbf{A}^T\), is the matrix obtained by exchanging \(\mathbf{A}\)’s rows and columns. It is obtained by replacing all elements \(a_{ij}\) with \(a_{ji}\). For example:
\[\mathbf{A}=\begin{pmatrix} 3 &-2 &4 \\ 5 &3i &3 \end{pmatrix}\rightarrow \mathbf{A}^T=\begin{pmatrix} 3 &5\\ -2 &3i\\ 4&3 \end{pmatrix} \nonumber \]
Matrix Multiplication
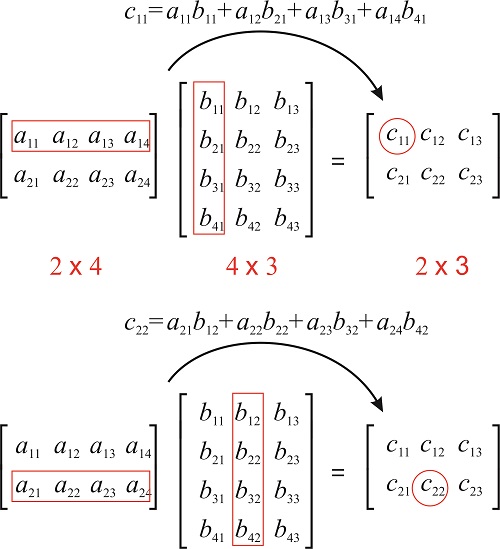
To multiply two matrices, the number of vertical columns in the first matrix must be the same as the number of rows in the second matrix. If \(\mathbf{A}\) has dimensions \(m\times n\) and \(\mathbf{B}\) has dimensions \(n\times p\), then the product \(\mathbf{AB}\) is defined, and has dimensions \(m\times p\).
\[c_{ij} = \sum a_{ij} \times b_{ij} \nonumber \]
The entry \(a_{ij} \times b_{ij}\) is obtained by multiplying row \(i\) of \(\mathbf{A}\) by column \(j\) of \(\mathbf{B}\), which is done by multiplying corresponding entries together and then adding the results:
Calculate the product
\[\begin{pmatrix} 1 &-2 &4 \\ 5 &0 &3 \\ 0 & 1/2 &9 \end{pmatrix}\begin{pmatrix} 1 &0 \\ 5 &3 \\ -1 &0 \end{pmatrix} \nonumber \]
Solution
We need to multiply a \(3\times 3\) matrix by a \(3\times 2\) matrix, so we expect a \(3\times 2\) matrix as a result.
\[\begin{pmatrix} 1 &-2 &4 \\ 5 &0 &3 \\ 0 & 1/2 &9 \end{pmatrix}\begin{pmatrix} 1 &0 \\ 5 &3 \\ -1 &0 \end{pmatrix}=\begin{pmatrix} a&b \\ c&d \\ e &f \end{pmatrix} \nonumber \]
To calculate \(a\), which is entry (1,1), we use row 1 of the matrix on the left and column 1 of the matrix on the right:
\[\begin{pmatrix} {\color{red}1} &{\color{red}-2} &{\color{red}4} \\ 5 &0 &3 \\ 0 & 1/2 &9 \end{pmatrix}\begin{pmatrix} {\color{red}1} &0 \\ {\color{red}5} &3 \\ {\color{red}-1} &0 \end{pmatrix}=\begin{pmatrix} {\color{red}a}&b \\ c&d \\ e &f \end{pmatrix}\rightarrow a=1\times 1+(-2)\times 5+4\times (-1)=-13 \nonumber \]
To calculate \(b\), which is entry (1,2), we use row 1 of the matrix on the left and column 2 of the matrix on the right:
\[\begin{pmatrix} {\color{red}1} &{\color{red}-2} &{\color{red}4} \\ 5 &0 &3 \\ 0 & 1/2 &9 \end{pmatrix}\begin{pmatrix} 1&{\color{red}0} \\ 5&{\color{red}3} \\ -1&{\color{red}0} \end{pmatrix}=\begin{pmatrix} a&{\color{red}b} \\ c&d \\ e &f \end{pmatrix}\rightarrow b=1\times 0+(-2)\times 3+4\times 0=-6 \nonumber \]
To calculate \(c\), which is entry (2,1), we use row 2 of the matrix on the left and column 1 of the matrix on the right:
\[\begin{pmatrix} 1&-2&4\\ {\color{red}5} &{\color{red}0} &{\color{red}3} \\ 0 & 1/2 &9 \end{pmatrix}\begin{pmatrix} {\color{red}1} &0 \\ {\color{red}5} &3 \\ {\color{red}-1} &0 \end{pmatrix}=\begin{pmatrix} a&b \\ {\color{red}c}&d \\ e &f \end{pmatrix}\rightarrow c=5\times 1+0\times 5+3\times (-1)=2 \nonumber \]
To calculate \(d\), which is entry (2,2), we use row 2 of the matrix on the left and column 2 of the matrix on the right:
\[\begin{pmatrix} 1&-2&4\\ {\color{red}5} &{\color{red}0} &{\color{red}3} \\ 0 & 1/2 &9 \end{pmatrix}\begin{pmatrix} 1&{\color{red}0} \\ 5&{\color{red}3} \\ -1&{\color{red}0} \end{pmatrix}=\begin{pmatrix} a&b \\ c&{\color{red}d} \\ e &f \end{pmatrix}\rightarrow d=5\times 0+0\times 3+3\times 0=0 \nonumber \]
To calculate \(e\), which is entry (3,1), we use row 3 of the matrix on the left and column 1 of the matrix on the right:
\[\begin{pmatrix} 1&-2&4\\ 5&0&3 \\ {\color{red}0} &{\color{red}1/2} &{\color{red}9} \end{pmatrix}\begin{pmatrix} {\color{red}1} &0 \\ {\color{red}5} &3 \\ {\color{red}-1} &0 \end{pmatrix}=\begin{pmatrix} a&b \\ c&d \\ {\color{red}e} &f \end{pmatrix}\rightarrow e=0\times 1+1/2\times 5+9\times (-1)=-13/2 \nonumber \]
To calculate \(f\), which is entry (3,2), we use row 3 of the matrix on the left and column 2 of the matrix on the right:
\[\begin{pmatrix} 1&-2&4\\ 5&0&3 \\ {\color{red}0} &{\color{red}1/2} &{\color{red}9} \end{pmatrix}\begin{pmatrix} 1&{\color{red}0} \\ 5&{\color{red}3} \\ -1&{\color{red}0} \end{pmatrix}=\begin{pmatrix} a&b \\ c&d \\ e&{\color{red}f} \end{pmatrix}\rightarrow f=0\times 0+1/2\times 3+9\times 0=3/2 \nonumber \]
The result is:
\[\displaystyle{\color{Maroon}\begin{pmatrix} 1 &-2 &4 \\ 5 &0 &3 \\ 0 & 1/2 &9 \end{pmatrix}\begin{pmatrix} 1 &0 \\ 5 &3 \\ -1 &0 \end{pmatrix}=\begin{pmatrix} -13&-6 \\ 2&0 \\ -13/2 &3/2 \end{pmatrix}} \nonumber \]
Calculate
\[\begin{pmatrix} 1 &-2 &4 \\ 5 &0 &3 \\ \end{pmatrix}\begin{pmatrix} 1 \\ 5 \\ -1 \end{pmatrix}\nonumber \]
Solution
We are asked to multiply a \(2\times 3\) matrix by a \(3\times 1\) matrix (a column vector). The result will be a \(2\times 1\) matrix (a vector).
\[\begin{pmatrix} 1 &-2 &4 \\ 5 &0 &3 \\ \end{pmatrix}\begin{pmatrix} 1 \\ 5 \\ -1 \end{pmatrix}=\begin{pmatrix} a \\ b \end{pmatrix}\nonumber \]
\[a=1\times1+(-2)\times 5+ 4\times (-1)=-13\nonumber \]
\[b=5\times1+0\times 5+ 3\times (-1)=2\nonumber \]
The solution is:
\[\displaystyle{\color{Maroon}\begin{pmatrix} 1 &-2 &4 \\ 5 &0 &3 \\ \end{pmatrix}\begin{pmatrix} 1 \\ 5 \\ -1 \end{pmatrix}=\begin{pmatrix} -13 \\ 2 \end{pmatrix}}\nonumber \]
Need help? The link below contains solved examples: Multiplying matrices of different shapes (three examples): http://tinyurl.com/kn8ysqq
External links:
- Multiplying matrices, example 1: http://patrickjmt.com/matrices-multiplying-a-matrix-by-another-matrix/
- Multiplying matrices, example 2: http://patrickjmt.com/multiplying-matrices-example-2/
- Multiplying matrices, example 3: http://patrickjmt.com/multiplying-matrices-example-3/
The Commutator
Matrix multiplication is not, in general, commutative. For example, we can perform
\[\begin{pmatrix} 1 &-2 &4 \\ 5 &0 &3 \\ \end{pmatrix}\begin{pmatrix} 1 \\ 5 \\ -1 \end{pmatrix}=\begin{pmatrix} -13 \\ 2 \end{pmatrix} \nonumber \]
but cannot perform
\[\begin{pmatrix} 1 \\ 5 \\ -1 \end{pmatrix}\begin{pmatrix} 1 &-2 &4 \\ 5 &0 &3 \\ \end{pmatrix} \nonumber \]
Even with square matrices, that can be multiplied both ways, multiplication is not commutative. In this case, it is useful to define the commutator, defined as:
\[[\mathbf{A},\mathbf{B}]=\mathbf{A}\mathbf{B}-\mathbf{B}\mathbf{A} \nonumber \]
Given \(\mathbf{A}=\begin{pmatrix} 3&1 \\ 2&0 \end{pmatrix}\) and \(\mathbf{B}=\begin{pmatrix} 1&0 \\ -1&2 \end{pmatrix}\)
Calculate the commutator \([\mathbf{A},\mathbf{B}]\)
Solution
\[[\mathbf{A},\mathbf{B}]=\mathbf{A}\mathbf{B}-\mathbf{B}\mathbf{A}\nonumber \]
\[\mathbf{A}\mathbf{B}=\begin{pmatrix} 3&1 \\ 2&0 \end{pmatrix}\begin{pmatrix} 1&0 \\ -1&2 \end{pmatrix}=\begin{pmatrix} 3\times 1+1\times (-1)&3\times 0 +1\times 2 \\ 2\times 1+0\times (-1)&2\times 0+ 0\times 2 \end{pmatrix}=\begin{pmatrix} 2&2 \\ 2&0 \end{pmatrix}\nonumber \]
\[\mathbf{B}\mathbf{A}=\begin{pmatrix} 1&0 \\ -1&2 \end{pmatrix}\begin{pmatrix} 3&1 \\ 2&0 \end{pmatrix}=\begin{pmatrix} 1\times 3+0\times 2&1\times 1 +0\times 0 \\ -1\times 3+2\times 2&-1\times 1+2\times 0 \end{pmatrix}=\begin{pmatrix} 3&1 \\ 1&-1 \end{pmatrix}\nonumber \]
\[[\mathbf{A},\mathbf{B}]=\mathbf{A}\mathbf{B}-\mathbf{B}\mathbf{A}=\begin{pmatrix} 2&2 \\ 2&0 \end{pmatrix}-\begin{pmatrix} 3&1 \\ 1&-1 \end{pmatrix}=\begin{pmatrix} -1&1 \\ 1&1 \end{pmatrix}\nonumber \]
\[\displaystyle{\color{Maroon}[\mathbf{A},\mathbf{B}]=\begin{pmatrix} -1&1 \\ 1&1 \end{pmatrix}}\nonumber \]
Multiplication of a vector by a scalar
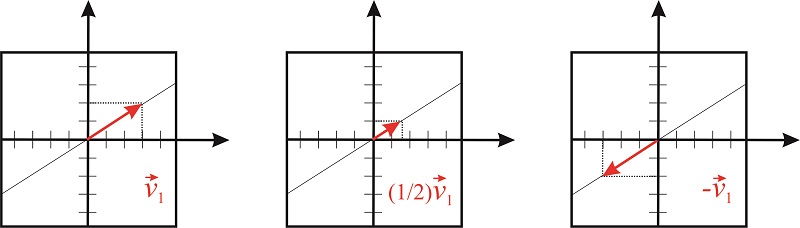
The multiplication of a vector \(\vec{v_1}\) by a scalar \(n\) produces another vector of the same dimensions that lies in the same direction as \(\vec{v_1}\);
\[n\begin{pmatrix} x \\ y \end{pmatrix}=\begin{pmatrix} nx \\ ny \end{pmatrix} \nonumber \]
The scalar can stretch or compress the length of the vector, but cannot rotate it (figure [fig:vector_by_scalar]).
Multiplication of a square matrix by a vector
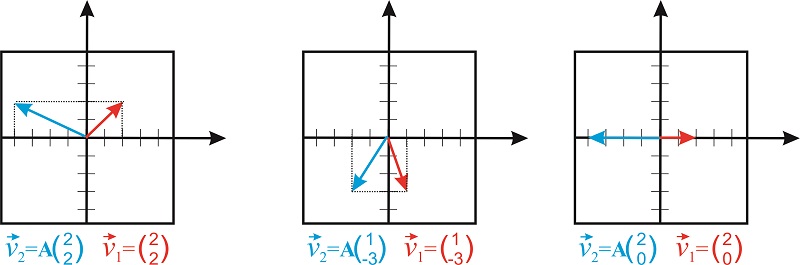
The multiplication of a vector \(\vec{v_1}\) by a square matrix produces another vector of the same dimensions of \(\vec{v_1}\). For example, we can multiply a \(2\times 2\) matrix and a 2-dimensional vector:
\[\begin{pmatrix} a&b \\ c&d \end{pmatrix}\begin{pmatrix} x \\ y \end{pmatrix}=\begin{pmatrix} ax+by \\ cx+dy \end{pmatrix} \nonumber \]
For example, consider the matrix
\[\mathbf{A}=\begin{pmatrix} -2 &0 \\ 0 &1 \end{pmatrix} \nonumber \]
The product
\[\begin{pmatrix} -2&0 \\ 0&1 \end{pmatrix}\begin{pmatrix} x \\ y \end{pmatrix} \nonumber \]
is
\[\begin{pmatrix} -2x \\ y \end{pmatrix} \nonumber \]
We see that \(2\times 2\) matrices act as operators that transform one 2-dimensional vector into another 2-dimensional vector. This particular matrix keeps the value of \(y\) constant and multiplies the value of \(x\) by -2 (Figure \(\PageIndex{3}\)).
Notice that matrices are useful ways of representing operators that change the orientation and size of a vector. An important class of operators that are of particular interest to chemists are the so-called symmetry operators.
Attribution
This page was adapted from Matrices (click here), contributed by Marcia Levitus, Associate Professor (Biodesign Institute) at Arizona State University.
Curated or created by Kathryn Haas