
12.5: The \(C_{3V}\) Point Group Has a 2-D Irreducible Representation
- Page ID
- 63728
The first thing we need to do before we can construct a matrix representation is to choose a basis. For \(NH_3\), we will select a basis \(\begin{pmatrix} s_N, s_1, s_2, s_3 \end{pmatrix}\) that consists of the valence s orbitals on the nitrogen and the three hydrogen atoms. We need to consider what happens to this basis when it is acted on by each of the symmetry operations in the \(C_{3v}\) point group, and determine the matrices that would be required to produce the same effect. The basis set and the symmetry operations in the \(C_{3v}\) point group are summarized in the figure below.
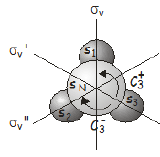
The effects of the symmetry operations on our chosen basis are as follows:
\[\begin{array}{ll} E & \begin{pmatrix} s_N, s_1, s_2, s_3 \end{pmatrix} \rightarrow \begin{pmatrix} s_N, s_1, s_2, s_3 \end{pmatrix} \\ C_3^+ & \begin{pmatrix} s_N, s_1, s_2, s_3 \end{pmatrix} \rightarrow \begin{pmatrix} s_N, s_2, s_3, s_1 \end{pmatrix} \\ C_3^- & \begin{pmatrix} s_N, s_1, s_2, s_3 \end{pmatrix} \rightarrow \begin{pmatrix} s_N, s_3, s_1, s_2 \end{pmatrix} \\ \sigma_v & \begin{pmatrix} s_N, s_1, s_2, s_3 \end{pmatrix} \rightarrow \begin{pmatrix} s_N, s_1, s_3, s_2 \end{pmatrix} \\ \sigma_v' & \begin{pmatrix} s_N, s_1, s_2, s_3 \end{pmatrix} \rightarrow \begin{pmatrix} s_N, s_2, s_1, s_3 \end{pmatrix} \\ \sigma_v'' & \begin{pmatrix} s_N, s_1, s_2, s_3 \end{pmatrix} \rightarrow \begin{pmatrix} s_N, s_3, s_2, s_1 \end{pmatrix} \end{array} \label{10.1}\]
By inspection, the matrices that carry out the same transformations are:
\[\begin{array}{ll} \Gamma(E) & \begin{pmatrix} s_N, s_1, s_2, s_3 \end{pmatrix}\begin{pmatrix} 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{pmatrix} = \begin{pmatrix} s_N, s_1, s_2, s_3 \end{pmatrix} \\ \Gamma(C_3^+) & \begin{pmatrix} s_N, s_1, s_2, s_3 \end{pmatrix} \begin{pmatrix} 1 & 0 & 0 & 0 \\ 0 & 0 & 0 & 1 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & 0 \end{pmatrix} = \begin{pmatrix} s_N, s_2, s_3, s_1 \end{pmatrix} \\ \Gamma(C_3^-) & \begin{pmatrix} s_N, s_1, s_2, s_3 \end{pmatrix} \begin{pmatrix} 1 & 0 & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \\ 0 & 1 & 0 & 0 \end{pmatrix} = \begin{pmatrix} s_N, s_3, s_1, s_2 \end{pmatrix} \\ \Gamma(\sigma_v) & \begin{pmatrix} s_N, s_1, s_2, s_3 \end{pmatrix} \begin{pmatrix} 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 0 & 1 \\ 0 & 0 & 1 & 0 \end{pmatrix} = \begin{pmatrix} s_N, s_1, s_3, s_2 \end{pmatrix} \\ \Gamma(\sigma_v') & \begin{pmatrix} s_N, s_1, s_2, s_3 \end{pmatrix} \begin{pmatrix} 1 & 0 & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 0 & 1 \end{pmatrix} = \begin{pmatrix} s_N, s_2, s_1, s_3 \end{pmatrix} \\ \Gamma(\sigma_v'') & \begin{pmatrix} s_N, s_1, s_2, s_3 \end{pmatrix} \begin{pmatrix} 1 & 0 & 0 & 0 \\ 0 & 0 & 0 & 1 \\ 0 & 0 & 1 & 0 \\ 0 & 1 & 0 & 0 \end{pmatrix} = \begin{pmatrix} s_N, s_3, s_2, s_1 \end{pmatrix} \end{array} \label{10.2}\]
These six matrices therefore form a representation for the \(C_{3v}\) point group in the \(\begin{pmatrix} s_N, s_1, s_2, s_3 \end{pmatrix}\) basis. They multiply together according to the group multiplication table and satisfy all the requirements for a mathematical group.
Reduced Representations
If we look at the matrices carefully we see that they all take the same block diagonal form (a square matrix is said to be block diagonal if all the elements are zero except for a set of submatrices lying along the diagonal).
\[\begin{array}{ccc} \Gamma(E) & \Gamma(C_3^+) & \Gamma(C_3^-) & \Gamma(\sigma_v) & \Gamma(\sigma_v') & \Gamma(\sigma_v'') \\ \scriptsize{\begin{pmatrix} \textbf{1} & \text{0} & \text{0} & \text{0} \\ \text{0} & \textbf{1} & \textbf{0} & \textbf{0} \\ \text{0} & \textbf{0} & \textbf{1} & \textbf{0} \\ \text{0} & \textbf{0} & \textbf{0} & \textbf{1} \end{pmatrix}} & \scriptsize{\begin{pmatrix} \textbf{1} & 0 & 0 & 0 \\ 0 & \textbf{0} & \textbf{1} & \textbf{0} \\ 0 & \textbf{0} & \textbf{0} & \textbf{1} \\ 0 & \textbf{1} & \textbf{0} & \textbf{0} \end{pmatrix}} & \scriptsize{\begin{pmatrix} \textbf{1} & 0 & 0 & 0 \\ 0 & \textbf{0} & \textbf{0} & \textbf{1} \\ 0 & \textbf{1} & \textbf{0} & \textbf{0} \\ 0 & \textbf{0} & \textbf{1} & \textbf{0} \end{pmatrix}} & \scriptsize{\begin{pmatrix} \textbf{1} & 0 & 0 & 0 \\ 0 & \textbf{1} & \textbf{0} & \textbf{0} \\ 0 & \textbf{0} & \textbf{0} & \textbf{1} \\ 0 & \textbf{0} & \textbf{1} & \textbf{0} \end{pmatrix}} & \scriptsize{\begin{pmatrix} \textbf{1} & 0 & 0 & 0 \\ 0 & \textbf{0} & \textbf{1} & \textbf{0} \\ 0 & \textbf{1} & \textbf{0} & \textbf{0} \\ 0 & \textbf{0} & \textbf{0} & \textbf{1} \end{pmatrix}} & \scriptsize{\begin{pmatrix} \textbf{1} & 0 & 0 & 0 \\ 0 & \textbf{0} & \textbf{0} & \textbf{1} \\ 0 & \textbf{0} & \textbf{1} & \textbf{0} \\ 0 & \textbf{1} & \textbf{0} & \textbf{0} \end{pmatrix}} \\ \chi(E) = 4 & \chi(C_3^+) = 1 & \chi(C_3^-) = 1 & \chi(\sigma_v) = 2 & \chi(\sigma_v') = 2 & \chi(\sigma_v'') = 2 \end{array} \]
A block diagonal matrix can be written as the direct sum of the matrices that lie along the diagonal. In the case of the \(C_{3v}\) matrix representation, each of the matrix representatives may be written as the direct sum of a \(1 \times1\) matrix and a \(3 \times3\) matrix.
\[\Gamma^{(4)}(g) = \Gamma^{(1)}(g) \otimes \Gamma^{(3)}(g) \label{12.1}\]
in which the bracketed superscripts denote the dimensionality of the matrices. Note that a direct sum is very different from ordinary matrix addition since it produces a matrix of higher dimensionality. A direct sum of two matrices of orders \(n\) and \(m\) is performed by placing the matrices to be summed along the diagonal of a matrix of order \(n + m\) and filling in the remaining elements with zeroes.
The reason why this result is useful in group theory is that the two sets of matrices \(\Gamma^{(1)}(g)\) and \(\Gamma^{(3)}(g)\) also satisfy all of the requirements for a matrix representation. Each set contains the identity and an inverse for each member, and the members multiply together associatively according to the group multiplication table\(^3\). Recall that the basis for the original four-dimensional representation had the \(s\) orbitals \(\begin{pmatrix} s_N, s_1, s_2, s_3 \end{pmatrix}\) of ammonia as its basis. The first set of reduced matrices, \(\Gamma^{(1)}(g)\), forms a one-dimensional representation with \(\begin{pmatrix} s_N \end{pmatrix}\) as its basis. The second set, \(\Gamma^{(3)}(g)\) forms a three-dimensional representation with the basis \(\begin{pmatrix}s_1, s_2, s_3 \end{pmatrix}\). Separation of the original representation into representations of lower dimensionality is called reduction of the representation. The two reduced representations are shown below.
\[\begin{array}{cccccccl} g & E & C_3^+ & C_3^- & \sigma_v & \sigma_v' & \sigma_v'' & \\ \Gamma^{(1)}(g) & (1) & (1) & (1) & (1) & (1) & (1) & \begin{array}{l} \small \text{1D representation} \\ \small \text{spanned by} \: (s_N) \end{array} \\ \Gamma^{(3)}(g) & \scriptsize{\begin{pmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{pmatrix}} & \scriptsize{\begin{pmatrix} 0 & 1 & 0 \\ 0 & 0 & 1 \\ 1 & 0 & 0 \end{pmatrix}} & \scriptsize{\begin{pmatrix} 0 & 0 & 1 \\ 1 & 0 & 0 \\ 0 & 1 & 0 \end{pmatrix}} & \scriptsize{\begin{pmatrix} 1 & 0 & 0 \\ 0 & 0 & 1 \\ 0 & 1 & 0 \end{pmatrix}} & \scriptsize{\begin{pmatrix} 0 & 1 & 0 \\ 1 & 0 & 0 \\ 0 & 0 & 1 \end{pmatrix}} & \scriptsize{\begin{pmatrix} 0 & 0 & 1 \\ 0 & 1 & 0 \\ 1 & 0 & 0 \end{pmatrix}} & \begin{array}{l} \small \text{3D representation} \\ \small \text{spanned by} \: \begin{pmatrix} s_1, s_2, s_3 \end{pmatrix} \end{array} \end{array} \]
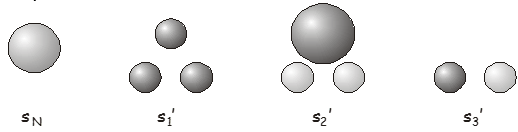
The logical next step is to investigate whether or not the three dimensional representation \(\Gamma^{(3)}(g)\) can be reduced any further. As it stands, the matrices making up this representation are not in block diagonal form (some of you may have noted that the matrices representing \(E\) and \(\sigma_v\) are block diagonal, but in order for a representation to be reducible all of the matrix representatives must be in the same block diagonal form) so the representation is not reducible. However, we can carry out a similarity transformation (see \(10.1\)) to a new representation spanned by a new set of basis functions (made up of linear combinations of \(\begin{pmatrix} s_1, s_2, s_3 \end{pmatrix}\)), which is reducible. In this case, the appropriate (normalized) linear combinations to use as our new basis functions are
\[\begin{array}{c} s_1' = \dfrac{1}{\sqrt{3}}(s_1 + s_2 + s_3) \\ s_2' = \dfrac{1}{\sqrt{6}}(2s_1 - s_2 - s_3) \\ s_3' = \dfrac{1}{\sqrt{2}}(s_2 - s_3) \end{array} \label{12.2}\]
or in matrix form
\[\begin{array}{cccc} \begin{pmatrix} s_1', s_2', s_3' \end{pmatrix} & = & \begin{pmatrix} s_1, s_2, s_3 \end{pmatrix} & \begin{pmatrix} \dfrac{1}{\sqrt{3}} & \dfrac{2}{\sqrt{6}} & 0 \\ \dfrac{1}{\sqrt{3}} & -\dfrac{1}{\sqrt{6}} & \dfrac{1}{\sqrt{2}} \\ \dfrac{1}{\sqrt{3}} & -\dfrac{1}{\sqrt{6}} & -\dfrac{1}{\sqrt{2}} \end{pmatrix} \\ \textbf{x'} & = & \textbf{x} & C \end{array} \label{12.3}\]
The matrices in the new representation are found from \(\Gamma'(g)\) = \(C^{-1}\Gamma(g)C\) to be
\[\begin{array}{lcccccc} & E & C_3^+ & C_3^- & \sigma_v & \sigma_v' & \sigma_v'' \\ \Gamma^{(3),}(g) & \scriptsize{\begin{pmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{pmatrix}} & \scriptsize{\begin{pmatrix} 1 & 0 & 0 \\ 0 & -\dfrac{1}{2} & \dfrac{\sqrt{3}}{2} \\ 0 & -\dfrac{\sqrt{3}}{2} & -\dfrac{1}{2} \end{pmatrix}} & \scriptsize{\begin{pmatrix} 1 & 0 & 0 \\ 0 & -\dfrac{1}{2} & -\dfrac{\sqrt{3}}{2} \\ 0 & \dfrac{\sqrt{3}}{2} & -\dfrac{1}{2} \end{pmatrix}} & \scriptsize{\begin{pmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & -1 \end{pmatrix}} & \scriptsize{\begin{pmatrix} 1 & 0 & 0 \\ 0 & -\dfrac{1}{2} & \dfrac{\sqrt{3}}{2} \\ 0 & \dfrac{\sqrt{3}}{2} & \dfrac{1}{2} \end{pmatrix}} & \scriptsize{\begin{pmatrix} 1 & 0 & 0 \\ 0 & -\dfrac{1}{2} & -\dfrac{\sqrt{3}}{2} \\ 0 & -\dfrac{\sqrt{3}}{2} & \dfrac{1}{2} \end{pmatrix}} \end{array} \]
We see that each matrix is now in block diagonal form, and the representation may be reduced into the direct sum of a 1 x 1 representation spanned by \(\begin{pmatrix} s_1' \end{pmatrix}\) and a 2x2 representation spanned by \(\begin{pmatrix} s_2', s_3' \end{pmatrix}\). The complete set of reduced representations obtained from the original 4D representation is:
\[\begin{array}{ccccccl} E & C_3^+ & C_3^- & \sigma_v & \sigma_v' & \sigma_v'' & \\ (1) & (1) & (1) & (1) & (1) & (1) & \begin{array}{l} \text{1D representation spanned} \\ \text{by} \: \begin{pmatrix} s_N \end{pmatrix} \end{array} \\ (1) & (1) & (1) & (1) & (1) & (1) & \begin{array}{l} \text{1D representation spanned} \\ \text{by} \: \begin{pmatrix} s_1' \end{pmatrix} \end{array} \\ \scriptsize{\begin{pmatrix} 1 & 0 \\ 0 & 1 \end{pmatrix}} & \scriptsize{\begin{pmatrix} -\dfrac{1}{2} & \dfrac{\sqrt{3}}{2} \\ -\dfrac{\sqrt{3}}{2} & -\dfrac{1}{2} \end{pmatrix}} & \scriptsize{\begin{pmatrix} -\dfrac{1}{2} & -\dfrac{\sqrt{3}}{2} \\ \dfrac{\sqrt{3}}{2} & -\dfrac{1}{2} \end{pmatrix}} & \scriptsize{\begin{pmatrix} 1 & 0 \\ 0 & -1 \end{pmatrix}} & \scriptsize{\begin{pmatrix} -\dfrac{1}{2} & \dfrac{\sqrt{3}}{2} \\ \dfrac{\sqrt{3}}{2} & \dfrac{1}{2} \end{pmatrix}} & \scriptsize{\begin{pmatrix} -\dfrac{1}{2} & -\dfrac{\sqrt{3}}{2} \\ -\dfrac{\sqrt{3}}{2} & \dfrac{1}{2} \end{pmatrix}} & \begin{array}{l} \text{2D representation spanned} \\ \text{by} \: \begin{pmatrix} s_2', s_3' \end{pmatrix} \end{array} \end{array}\]
This is as far as we can go in reducing this representation. None of the three representations above can be reduced any further, and they are therefore called irreducible representations, of the point group. Formally, a representation is an irreducible representation if there is no similarity transform that can simultaneously convert all of the representatives into block diagonal form. The linear combination of basis functions that converts a matrix representation into block diagonal form, allowing reduction of the representation, is called a symmetry adapted linear combination (SALC).
Irreducible Representations
The two one-dimensional irreducible representations spanned by \(s_N\) and \(s_1'\) are seen to be identical. This means that \(s_N\) and \(s_1'\) have the ‘same symmetry’, transforming in the same way under all of the symmetry operations of the point group and forming bases for the same matrix representation. As such, they are said to belong to the same symmetry species. There are a limited number of ways in which an arbitrary function can transform under the symmetry operations of a group, giving rise to a limited number of symmetry species. Any function that forms a basis for a matrix representation of a group must transform as one of the symmetry species of the group. The irreducible representations of a point group are labeled according to their symmetry species as follows:
- 1D representations are labeled \(A\) or \(B\), depending on whether they are symmetric (character \(+1\)) or antisymmetric (character \(-1\)) under rotation about the principal axis.
- 2D representations are labeled \(E\), 3D representations are labeled \(T\).
- In groups containing a center of inversion, \(g\) and \(u\) labels (from the German gerade and ungerade, meaning symmetric and antisymmetric) denote the character of the irreducible representation under inversion (\(+1\) for \(g\), \(-1\) for \(u\))
- In groups with a horizontal mirror plane but no center of inversion, the irreducible representations are given prime and double prime labels to denote whether they are symmetric (character \(+1\) or antisymmetric (character \(-1\)) under reflection in the plane.
- If further distinction between irreducible representations is required, subscripts \(1\) and \(2\) are used to denote the character with respect to a \(C_2\) rotation perpendicular to the principal axis, or with respect to a vertical reflection if there are no \(C_2\) rotations.
The 1D irreducible representation in the \(C_{3v}\) point group is symmetric (has character \(+1\)) under all the symmetry operations of the group. It therefore belongs to the irreducible representation \(A_1\). The 2D irreducible representation has character \(2\) under the identity operation, \(-1\) under rotation, and \(0\) under reflection, and belongs to the irreducible representation \(E\).
Sometimes there is confusion over the relationship between a function \(f\) and its irreducible representation, but it is quite important that you understand the connection. There are several different ways of stating the relationship. For example, the following statements all mean the same thing:
- "\(f\) has \(A_2\) symmetry"
- "\(f\) transforms as \(A_2\)"
- "\(f\) has the same symmetry
Contributors
Claire Vallance (University of Oxford)