
16.2: Spherical Coordinates
- Page ID
- 426511
- Understand the concept of area and volume elements in cartesian, polar and spherical coordinates.
- Be able to integrate functions expressed in polar or spherical coordinates.
- Understand how to normalize orbitals expressed in spherical coordinates, and perform calculations involving triple integrals.
Coordinate Systems
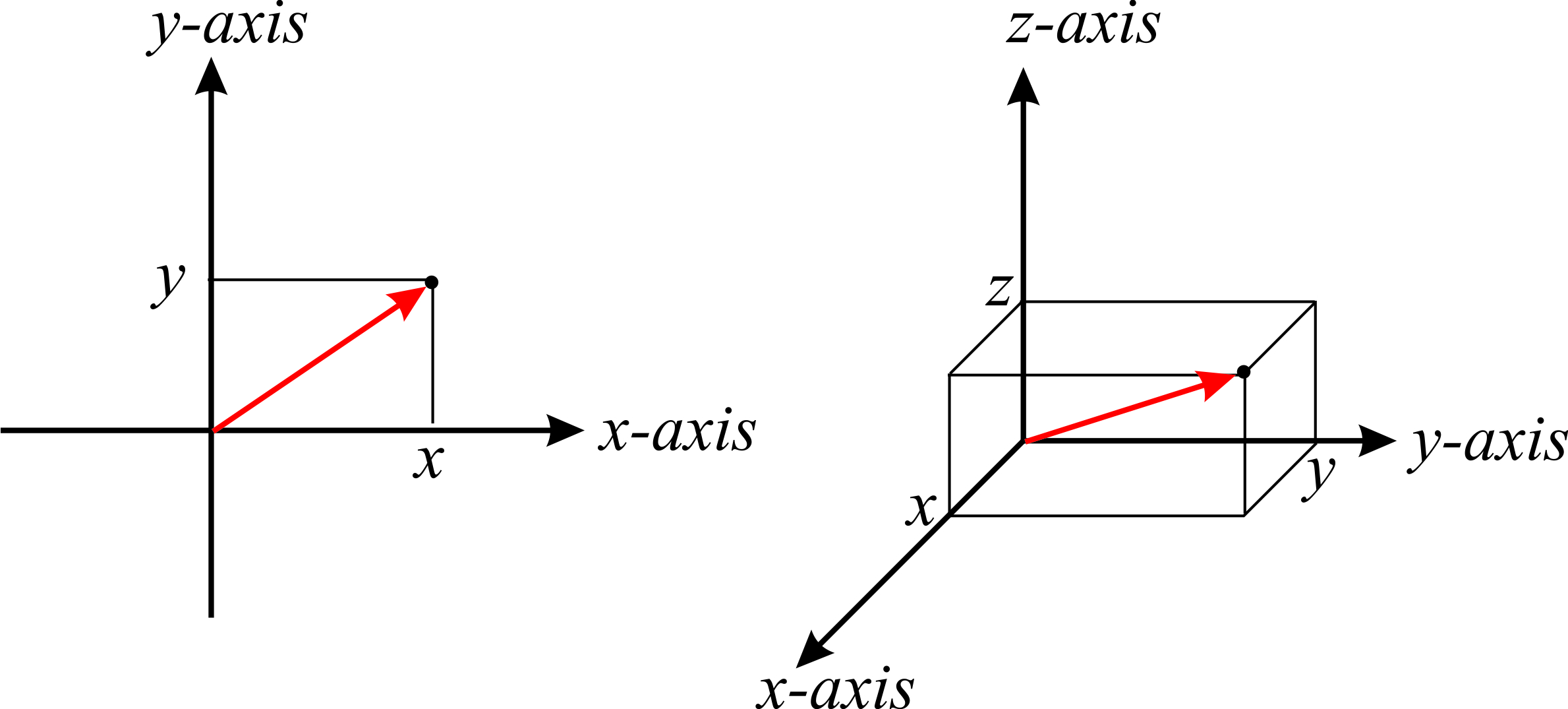
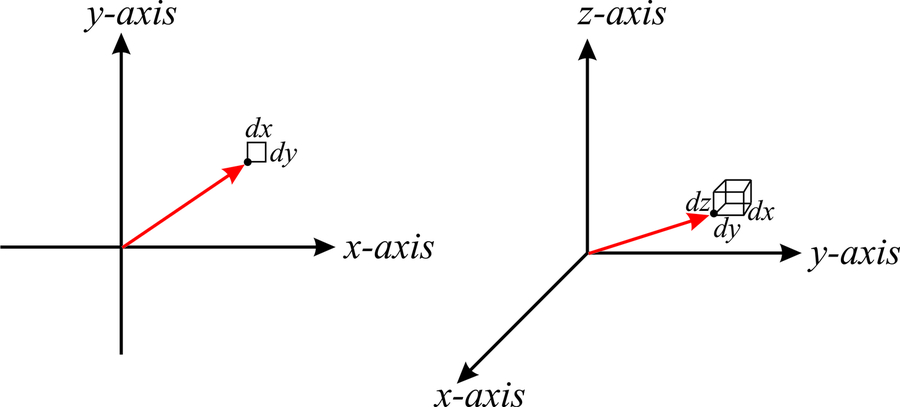
The simplest coordinate system consists of coordinate axes oriented perpendicularly to each other. These coordinates are known as cartesian coordinates or rectangular coordinates, and you are already familiar with their two-dimensional and three-dimensional representation. In the plane, any point \(P\) can be represented by two signed numbers, usually written as \((x,y)\), where the coordinate \(x\) is the distance perpendicular to the \(x\) axis, and the coordinate \(y\) is the distance perpendicular to the \(y\) axis (Figure \(\PageIndex{1}\), left). In space, a point is represented by three signed numbers, usually written as \((x,y,z)\) (Figure \(\PageIndex{1}\), right).
Often, positions are represented by a vector, \(\vec{r}\), shown in red in Figure \(\PageIndex{1}\). In three dimensions, this vector can be expressed in terms of the coordinate values as \(\vec{r}=x\hat{i}+y\hat{j}+z\hat{k}\), where \(\hat{i}=(1,0,0)\), \(\hat{j}=(0,1,0)\) and \(\hat{z}=(0,0,1)\) are the so-called unit vectors.
We already know that often the symmetry of a problem makes it natural (and easier!) to use other coordinate systems. In two dimensions, the polar coordinate system defines a point in the plane by two numbers: the distance \(r\) to the origin, and the angle \(\theta\) that the position vector forms with the \(x\)-axis. Notice the difference between \(\vec{r}\), a vector, and \(r\), the distance to the origin (and therefore the modulus of the vector). Vectors are often denoted in bold face (e.g. r) without the arrow on top, so be careful not to confuse it with \(r\), which is a scalar.
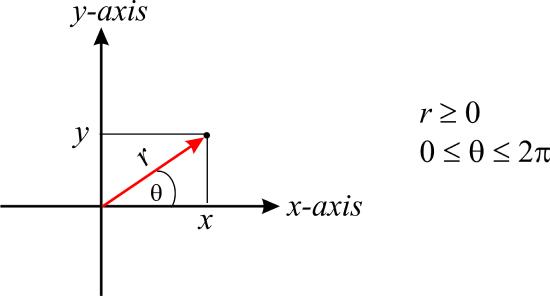
While in cartesian coordinates \(x\), \(y\) (and \(z\) in three-dimensions) can take values from \(-\infty\) to \(\infty\), in polar coordinates \(r\) is a positive value (consistent with a distance), and \(\theta\) can take values in the range \([0,2\pi]\).
The relationship between the cartesian and polar coordinates in two dimensions can be summarized as:
\[\label{eq:coordinates_1} x=r\cos\theta\]
\[\label{eq:coordinates_2} y=r\sin\theta\]
\[\label{eq:coordinates_3} r^2=x^2+y^2\]
\[\label{eq:coordinates_4} \tan \theta=y/x\]
In three dimensions, the spherical coordinate system defines a point in space by three numbers: the distance \(r\) to the origin, a polar angle \(\phi\) that measures the angle between the positive \(x\)-axis and the line from the origin to the point \(P\) projected onto the \(xy\)-plane, and the angle \(\theta\) defined as the is the angle between the \(z\)-axis and the line from the origin to the point \(P\):
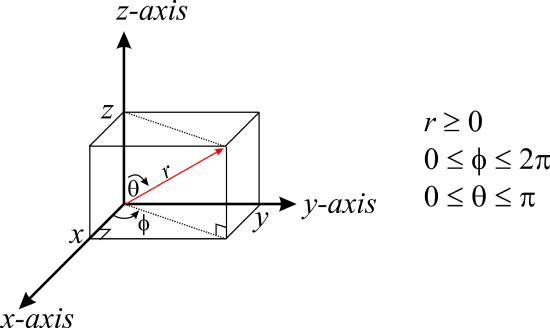
Before we move on, it is important to mention that depending on the field, you may see the Greek letter \(\theta\) (instead of \(\phi\)) used for the angle between the positive \(x\)-axis and the line from the origin to the point \(P\) projected onto the \(xy\)-plane. That is, \(\theta\) and \(\phi\) may appear interchanged. This can be very confusing, so you will have to be careful. When using spherical coordinates, it is important that you see how these two angles are defined so you can identify which is which.
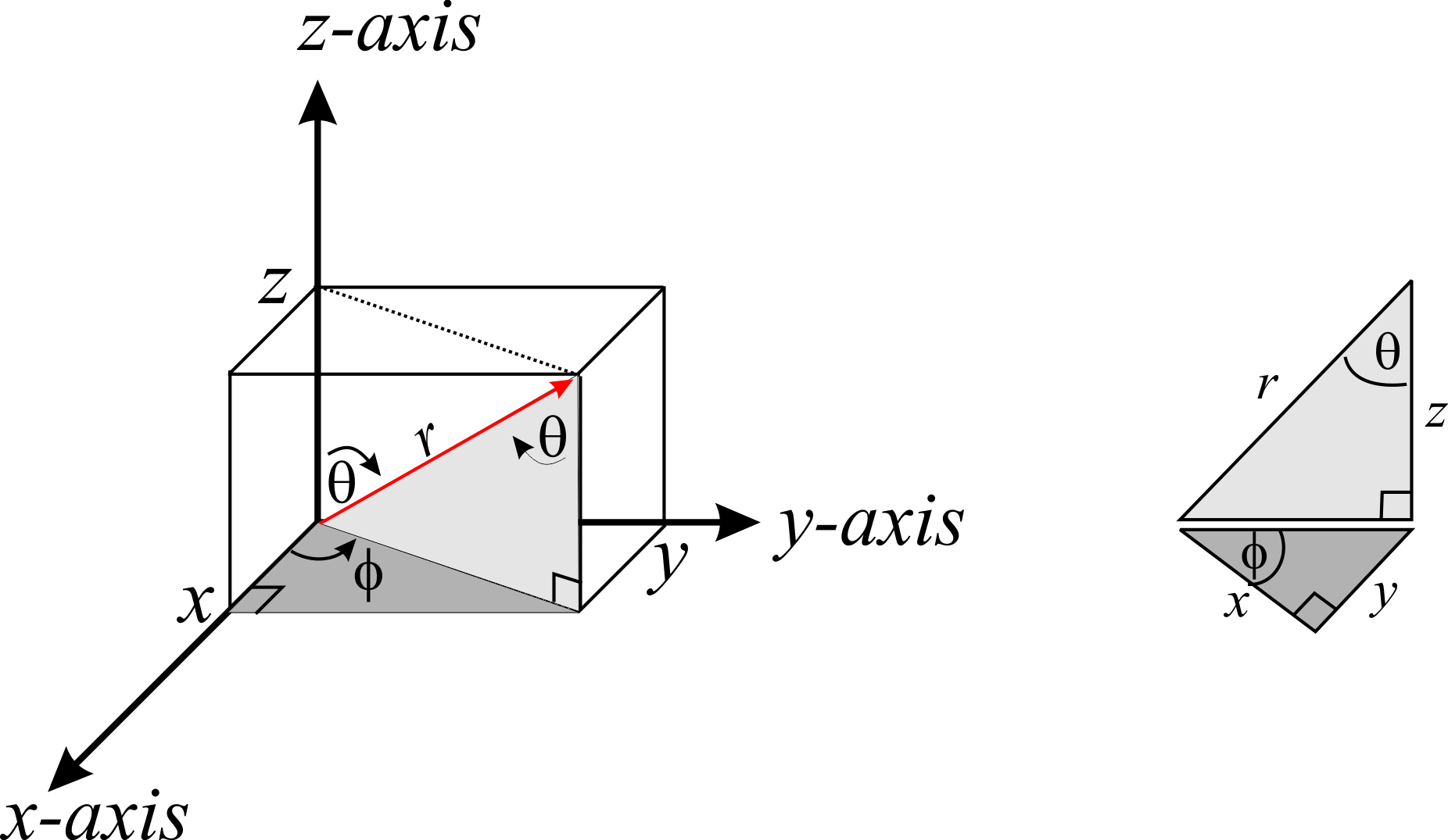
Spherical coordinates are useful in analyzing systems that are symmetrical about a point. For example a sphere that has the cartesian equation \(x^2+y^2+z^2=R^2\) has the very simple equation \(r = R\) in spherical coordinates. Spherical coordinates are the natural coordinates for physical situations where there is spherical symmetry (e.g. atoms). The relationship between the cartesian coordinates and the spherical coordinates can be summarized as:
\[\label{eq:coordinates_5} x=r\sin\theta\cos\phi\]
\[\label{eq:coordinates_6} y=r\sin\theta\sin\phi\]
\[\label{eq:coordinates_7} z=r\cos\theta\]
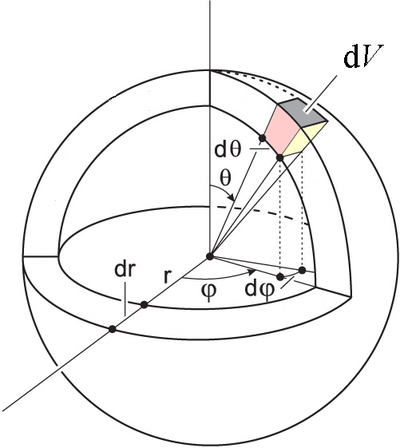
These relationships are not hard to derive if one considers the triangles shown in Figure \(\PageIndex{4}\):
Area and Volume Elements
In any coordinate system it is useful to define a differential area and a differential volume element. In cartesian coordinates the differential area element is simply \(dA=dx\;dy\) (Figure \(\PageIndex{1}\)), and the volume element is simply \(dV=dx\;dy\;dz\).
We already performed double and triple integrals in cartesian coordinates, and used the area and volume elements without paying any special attention. For example, in example [c2v:c2vex1], we were required to integrate the function \({\left | \psi (x,y,z) \right |}^2\) over all space, and without thinking too much we used the volume element \(dx\;dy\;dz\) (see page ). We also knew that “all space” meant \(-\infty\leq x\leq \infty\), \(-\infty\leq y\leq \infty\) and \(-\infty\leq z\leq \infty\), and therefore we wrote:
\[\int_{-\infty }^{\infty }\int_{-\infty }^{\infty }\int_{-\infty }^{\infty }{\left | \psi (x,y,z) \right |}^2\; dx \;dy \;dz=1 \nonumber\]
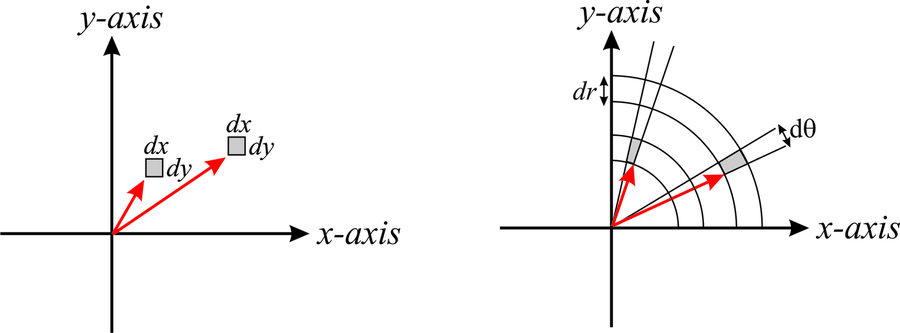
But what if we had to integrate a function that is expressed in spherical coordinates? Would we just replace \(dx\;dy\;dz\) by \(dr\; d\theta\; d\phi\)? The answer is no, because the volume element in spherical coordinates depends also on the actual position of the point. This will make more sense in a minute. Coming back to coordinates in two dimensions, it is intuitive to understand why the area element in cartesian coordinates is \(dA=dx\;dy\) independently of the values of \(x\) and \(y\). This is shown in the left side of Figure \(\PageIndex{2}\). However, in polar coordinates, we see that the areas of the gray sections, which are both constructed by increasing \(r\) by \(dr\), and by increasing \(\theta\) by \(d\theta\), depend on the actual value of \(r\). Notice that the area highlighted in gray increases as we move away from the origin.
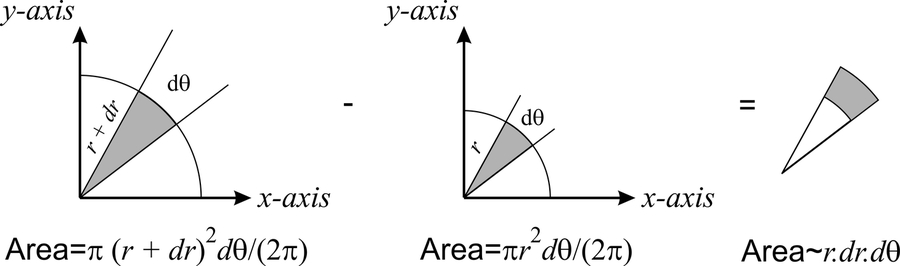
The area shown in gray can be calculated from geometrical arguments as
\[dA=\left[\pi (r+dr)^2- \pi r^2\right]\dfrac{d\theta}{2\pi}.\]
Because \(dr<<0\), we can neglect the term \((dr)^2\), and \(dA= r\; dr\;d\theta\) (see Figure \(10.2.3\)).
Let’s see how this affects a double integral with an example from quantum mechanics. The wave function of the ground state of a two dimensional harmonic oscillator is: \(\psi(x,y)=A e^{-a(x^2+y^2)}\). We know that the quantity \(|\psi|^2\) represents a probability density, and as such, needs to be normalized:
\[\int\limits_{all\;space} |\psi|^2\;dA=1 \nonumber\]
This statement is true regardless of whether the function is expressed in polar or cartesian coordinates. However, the limits of integration, and the expression used for \(dA\), will depend on the coordinate system used in the integration.
In cartesian coordinates, “all space” means \(-\infty<x<\infty\) and \(-\infty<y<\infty\). The differential of area is \(dA=dxdy\):
\[\int\limits_{all\;space} |\psi|^2\;dA=\int\limits_{-\infty}^{\infty}\int\limits_{-\infty}^{\infty} A^2e^{-2a(x^2+y^2)}\;dxdy=1 \nonumber\]
In polar coordinates, “all space” means \(0<r<\infty\) and \(0<\theta<2\pi\). The differential of area is \(dA=r\;drd\theta\). The function \(\psi(x,y)=A e^{-a(x^2+y^2)}\) can be expressed in polar coordinates as: \(\psi(r,\theta)=A e^{-ar^2}\)
\[\int\limits_{all\;space} |\psi|^2\;dA=\int\limits_{0}^{\infty}\int\limits_{0}^{2\pi} A^2 e^{-2ar^2}r\;d\theta dr=1 \nonumber\]
Both versions of the double integral are equivalent, and both can be solved to find the value of the normalization constant (\(A\)) that makes the double integral equal to 1. In polar coordinates:
\[\int\limits_{0}^{\infty}\int\limits_{0}^{2\pi} A^2 e^{-2ar^2}r\;d\theta dr=A^2\int\limits_{0}^{\infty}e^{-2ar^2}r\;dr\int\limits_{0}^{2\pi}\;d\theta =A^2\times\dfrac{1}{4a}\times2\pi=1 \nonumber\]
Therefore1, \(A=\sqrt{2a/\pi}\). The same value is of course obtained by integrating in cartesian coordinates.
It is now time to turn our attention to triple integrals in spherical coordinates. In cartesian coordinates, the differential volume element is simply \(dV= dx\,dy\,dz\), regardless of the values of \(x, y\) and \(z\). Using the same arguments we used for polar coordinates in the plane, we will see that the differential of volume in spherical coordinates is not \(dV=dr\,d\theta\,d\phi\). The geometrical derivation of the volume is a little bit more complicated, but from Figure \(\PageIndex{4}\) you should be able to see that \(dV\) depends on \(r\) and \(\theta\), but not on \(\phi\). The volume of the shaded region is
\[\label{eq:dv} dV=r^2\sin\theta\,d\theta\,d\phi\,dr\]
We will exemplify the use of triple integrals in spherical coordinates with some problems from quantum mechanics. We already introduced the Schrödinger equation, and even solved it for a simple system in Section 5.4. We also mentioned that spherical coordinates are the obvious choice when writing this and other equations for systems such as atoms, which are symmetric around a point.
As we saw in the case of the particle in the box (Section 5.4), the solution of the Schrödinger equation has an arbitrary multiplicative constant. Because of the probabilistic interpretation of wave functions, we determine this constant by normalization. The same situation arises in three dimensions when we solve the Schrödinger equation to obtain the expressions that describe the possible states of the electron in the hydrogen atom (i.e. the orbitals of the atom). The Schrödinger equation is a partial differential equation in three dimensions, and the solutions will be wave functions that are functions of \(r, \theta\) and \(\phi\). The lowest energy state, which in chemistry we call the 1s orbital, turns out to be:
\[\psi_{1s}=Ae^{-r/a_0} \nonumber\]
This particular orbital depends on \(r\) only, which should not surprise a chemist given that the electron density in all \(s\)-orbitals is spherically symmetric. We will see that \(p\) and \(d\) orbitals depend on the angles as well. Regardless of the orbital, and the coordinate system, the normalization condition states that:
\[\int\limits_{all\;space} |\psi|^2\;dV=1 \nonumber\]
For a wave function expressed in cartesian coordinates,
\[\int\limits_{all\;space} |\psi|^2\;dV=\int\limits_{-\infty}^{\infty}\int\limits_{-\infty}^{\infty}\int\limits_{-\infty}^{\infty}\psi^*(x,y,z)\psi(x,y,z)\,dxdydz \nonumber\]
where we used the fact that \(|\psi|^2=\psi^* \psi\).
In spherical coordinates, “all space” means \(0\leq r\leq \infty\), \(0\leq \phi\leq 2\pi\) and \(0\leq \theta\leq \pi\). The differential \(dV\) is \(dV=r^2\sin\theta\,d\theta\,d\phi\,dr\), so
\[\int\limits_{all\;space} |\psi|^2\;dV=\int\limits_{0}^{2\pi}\int\limits_{0}^{\pi}\int\limits_{0}^{\infty}\psi^*(r,\theta,\phi)\psi(r,\theta,\phi)\,r^2\sin\theta\,dr d\theta d\phi=1 \nonumber\]
Let’s see how we can normalize orbitals using triple integrals in spherical coordinates.
When solving the Schrödinger equation for the hydrogen atom, we obtain \(\psi_{1s}=Ae^{-r/a_0}\), where \(A\) is an arbitrary constant that needs to be determined by normalization. Find \(A\).
Solution
In spherical coordinates,
\[\int\limits_{all\; space} |\psi|^2\;dV=\int\limits_{0}^{2\pi}\int\limits_{0}^{\pi}\int\limits_{0}^{\infty}\psi^*(r,\theta,\phi)\psi(r,\theta,\phi)\,r^2\sin\theta\,dr d\theta d\phi=1 \nonumber\]
because this orbital is a real function, \(\psi^*(r,\theta,\phi)\psi(r,\theta,\phi)=\psi^2(r,\theta,\phi)\). In this case, \(\psi^2(r,\theta,\phi)=A^2e^{-2r/a_0}\).
Therefore,
\[\int\limits_{0}^{2\pi}\int\limits_{0}^{\pi}\int\limits_{0}^{\infty}\psi^*(r,\theta,\phi)\psi(r,\theta,\phi) \, r^2 \sin\theta \, dr d\theta d\phi=\int\limits_{0}^{2\pi}\int\limits_{0}^{\pi}\int\limits_{0}^{\infty}A^2e^{-2r/a_0}\,r^2\sin\theta\,dr d\theta d\phi=1 \nonumber\]
\[\int\limits_{0}^{2\pi}\int\limits_{0}^{\pi}\int\limits_{0}^{\infty}A^2e^{-2r/a_0}\,r^2\sin\theta\,dr d\theta d\phi=A^2\int\limits_{0}^{2\pi}d\phi\int\limits_{0}^{\pi}\sin\theta \;d\theta\int\limits_{0}^{\infty}e^{-2r/a_0}\,r^2\;dr \nonumber\]
The result is a product of three integrals in one variable:
\[\int\limits_{0}^{2\pi}d\phi=2\pi \nonumber\]
\[\int\limits_{0}^{\pi}\sin\theta \;d\theta=-\cos\theta|_{0}^{\pi}=2 \nonumber\]
\[\int\limits_{0}^{\infty}e^{-2r/a_0}\,r^2\;dr=? \nonumber\]
From the formula sheet:
\[\int_{0}^{\infty}x^ne^{-ax}dx=\dfrac{n!}{a^{n+1}}, \nonumber\]
where \(a>0\) and \(n\) is a positive integer.
In this case, \(n=2\) and \(a=2/a_0\), so:
\[\int\limits_{0}^{\infty}e^{-2r/a_0}\,r^2\;dr=\dfrac{2!}{(2/a_0)^3}=\dfrac{2}{8/a_0^3}=\dfrac{a_0^3}{4} \nonumber\]
Putting the three pieces together:
\[A^2\int\limits_{0}^{2\pi}d\phi\int\limits_{0}^{\pi}\sin\theta \;d\theta\int\limits_{0}^{\infty}e^{-2r/a_0}\,r^2\;dr=A^2\times2\pi\times2\times \dfrac{a_0^3}{4}=1 \nonumber\]
\[A^2\times \pi \times a_0^3=1\rightarrow A=\dfrac{1}{\sqrt{\pi a_0^3}} \nonumber\]
The normalized 1s orbital is, therefore:
\[\displaystyle{\color{Maroon}\dfrac{1}{\sqrt{\pi a_0^3}}e^{-r/a_0}} \nonumber\]