
7.4: Exact Differentials and State Functions
- Page ID
- 151693

Now, let us consider the general case of a continuous function \(f\left(x,y\right)\), for which the exact differential is
\[df=f_x\left(x,y\right)dx+f_y\left(x,y\right)dy. \nonumber \]
We want to integrate the exact differential over very short paths like paths a and b in Section 7.3. Let us evaluate the integral between \(\left(x_0,y_0\right)\) and \(\left(x_0+\Delta x,y_0+\Delta y\right)\) over the paths a* and b* sketched in Figure 3.
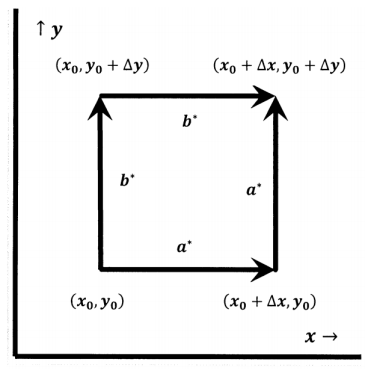
- Path a* has two linear segments. The first segment is the portion of the line \({y=y}_0\) as \(x\) goes from \(x_0\) to \(x_0+\Delta x\). Along the first segment \(\Delta y=0\). The second segment is the portion of the line \({x=x}_0+\Delta x\) as \(y\) goes from \(y_0\) to \(y_0+\Delta y\). Along the second segment, \(\Delta x=0\).
- Path b* has two linear segments also. The first segment is the portion of the line \(x=x_0\) as \(y\) goes from \(y_0\) to \(y_0+\Delta y\). Along the first segment, \(\Delta x=0\). The second segment is the portion of the line \({y=y}_0+\Delta y\) as \(x\) goes from \(x_0\) to \(x_0+\Delta x\). Along the second segment, \(\Delta y=0\).
Along path a*, we have
\[{\Delta }_{a^*}f=f_x\left(x_0,y_0\right)\Delta x+f_y\left(x_0+\Delta x,y_0\right)\Delta y\nonumber \]
Along path b*,
\[{\Delta }_{b^*}f=f_x\left(x_0,y_0+\Delta y\right)\Delta x+f_y\left(x_0,y_0\right)\Delta y\nonumber \]
In the limit as \(\Delta x\) and \(\Delta y\) become arbitrarily small, we must have \({\Delta }_{a^*}f={\Delta }_{b^*}f\), so that
\[f_x\left(x_0,y_0\right)\Delta x+f_y\left(x_0+\Delta x,y_0\right)\Delta y=f_x\left(x_0,y_0+\Delta y\right)\Delta x+f_y\left(x_0,y_0\right)\Delta y\nonumber \]
Rearranging this equation so that terms in \(f_x\) are on one side and terms in \(f_y\) are on the other side, dividing both sides by \(\Delta x\Delta y\), and taking the limit as \(\Delta x\to 0\) and \(\Delta y\to 0\), we have
\[{\mathop{\mathrm{lim}}_{\Delta x\to 0} \left[\frac{f_y\left(x_0+\Delta x,y_0\right)-f_y\left(x_0,y_0\right)}{\Delta x}\right]\ }={\mathop{\mathrm{lim}}_{\Delta y\to 0} \left[\frac{f_x\left(x_0,y_0+\Delta y\right)-f_x\left(x_0,y_0\right)}{\Delta y}\right]\ }\nonumber \]
These limits are the partial derivative of \(f_y\left(x_0,y_0\right)\) with respect to \(x\) and of \(f_x\left(x_0,y_0\right)\) with respect to \(y\). That is
\[{\left[{\frac{\partial }{\partial x}f}_y\left(x_0,y_0\right)\right]}_y={\left[\frac{\partial }{\partial x}\left(\frac{\partial f\left(x_0,y_0\right)}{\partial y}\right)\right]}_y=\frac{{\partial }^2f\left(x_0,y_0\right)}{\partial y\partial x}\nonumber \] and \[{\left[{\frac{\partial }{\partial y}f}_x\left(x_0,y_0\right)\right]}_x={\left[\frac{\partial }{\partial y}\left(\frac{\partial f\left(x_0,y_0\right)}{\partial x}\right)\right]}_x=\frac{{\partial }^2f\left(x_0,y_0\right)}{\partial x\partial y}\nonumber \]
This shows that, if \(f\left(x,y\right)\) is a continuous function of \(x\) and \(y\) whose partial derivatives exist, then
\[\frac{{\partial }^2f\left(x_0,y_0\right)}{\partial y\partial x}=\frac{{\partial }^2f\left(x_0,y_0\right)}{\partial x\partial y}\nonumber \]
The mixed second partial derivative of \(f\left(x,y\right)\) is independent of the order of differentiation. We also write these second partial derivatives as \(f_{xy}\left(x_0,y_0\right)\) and \(f_{yx}\left(x_0,y_0\right)\).
To summarize these points, if \(f\left(x,y\right)\) is a continuous function of \(x\) and \(y\), all of the following are true:
- \(f\left(x,y\right)\) represents a surface in a three-dimensional space.
- \(f\left(x,y\right)\) is a state function.
- The total differential is \[df={\left({\partial f}/{\partial x}\right)}_ydx+{\left({\partial f}/{\partial y}\right)}_xdy.\nonumber \]
- The total differential is exact.
- The line integral of \(df\) between two points is independent of the path of integration.
- The line integral of \(df\) around any closed path is zero: \(\oint{df=0}\).
- The mixed second-partial derivatives are equal; that is, \[\frac{{\partial }^2f}{\partial y\partial x}=\frac{{\partial }^2f}{\partial x\partial y}\nonumber \]