
1.2: Operator Properties and Mathematical Groups
- Page ID
- 221670

The inverse of A (defined as (A)–1) is B if A ⋅ B = E
For each of the five symmetry operations:
\(( E )^{-1}= E \Longrightarrow( E )^{-1} \cdot E = E \cdot E = E\)
\((\sigma)^{-1}=\sigma \Longrightarrow(\sigma)^{-1} \cdot \sigma=\sigma \cdot \sigma= E\)
\((i)^{-1}=i \Longrightarrow(i)^{-1} \cdot i=i \cdot i=E\)
\(\left(C_{n}^{m}\right)^{-1}=C_{n}^{n-m} \Longrightarrow\left(C_{n}^{m}\right)^{-1} \cdot C_{n}^{m}=C_{n}^{n-m} \cdot C_{n}^{m}=C_{n}^{n}=E\)
e.g. \(\left(C_{5}^{2}\right)^{-1}=C_{5}^{3}\) since \(C_{5}^{2} \cdot C_{5}^{3}=E\)
\(\left(S_{n}^{m}\right)^{-1}=S_{n}^{n-m}(n \text { even }) \Longrightarrow\left(S_{n}^{m}\right)^{-1} \cdot S_{n}^{m}=S_{n}^{n-m} \cdot S_{n}^{m}=S_{n}^{n}=C_{n}^{n} \cdot \sigma_{h}^{n}=E\)
\(\left(S_{n}^{m}\right)^{-1}=S_{n}^{2 n-m}(n \text { odd }) \Longrightarrow\left(S_{n}^{m}\right)^{-1} \cdot S_{n}^{m}=S_{n}^{2 n-m} \cdot S_{n}^{m}=S_{n}^{2 n}=C_{n}^{2 n} \cdot \sigma_{h}^{2 n}=E\)
Two operators commute when A ⋅ B = B ⋅ A
Example: Do C4(z) and σ(xz) commute?
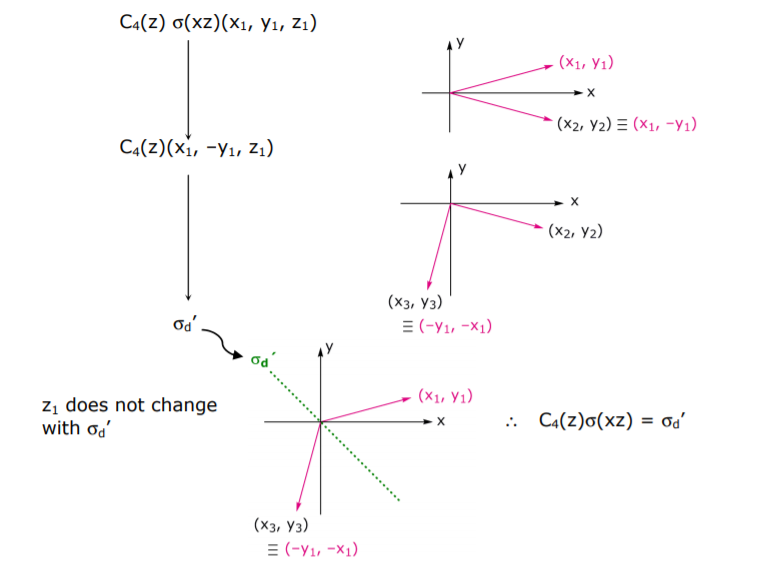
… or analyzing with matrix representations,
\(\left[\begin{array}{rrr}0 & 1 & 0 \\ -1 & 0 & 0 \\ 0 & 0 & 1\end{array}\right] \cdot\left[\begin{array}{rrr}1 & 0 & 0 \\ 0 & -1 & 0 \\ 0 & 0 & 1\end{array}\right]=\left[\begin{array}{rrr}0 & -1 & 0 \\ -1 & 0 & 0 \\ 0 & 0 & 1\end{array}\right]\)
C4(z) ⋅ σxz = σd´
Now applying the operations in the inverse order,
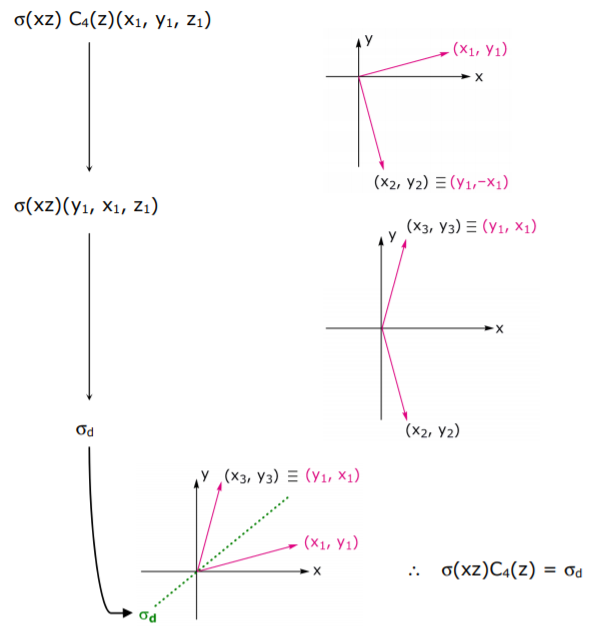
… or analyzing with matrix representations,
\(\left[\begin{array}{rrr}1 & 0 & 0 \\ 0 & -1 & 0 \\ 0 & 0 & 1\end{array}\right] \cdot\left[\begin{array}{rrr}0 & 1 & 0 \\ -1 & 0 & 0 \\ 0 & 0 & 1\end{array}\right]=\left[\begin{array}{lll}0 & 1 & 0 \\ 1 & 0 & 0 \\ 0 & 0 & 1\end{array}\right]\)
σxz ⋅ C4(z) = σd
\begin{equation}
\therefore \quad C_{4}(z) \sigma(x z)=\sigma_{d}^{\prime} \neq \sigma(x z) C_{4}(z)=\sigma_{d} \Rightarrow \text { so } C_{4}(z) \text { does not commute with } \sigma(x z)
\end{equation}
A collection of operations are a mathematical group when the following conditions are met:
- closure: all binary products must be members of the group
- identity: a group must contain the identity operator
- inverse: every operator must have an inverse
- associativity: associative law of multiplication must hold \[(A ⋅ B) ⋅ C = A ⋅ (B ⋅ C\]
(note: commutation not required… groups in which all operators do commute are called Abelian)
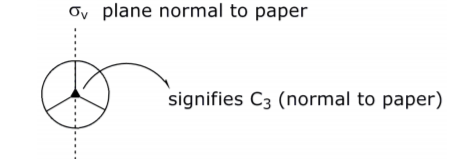
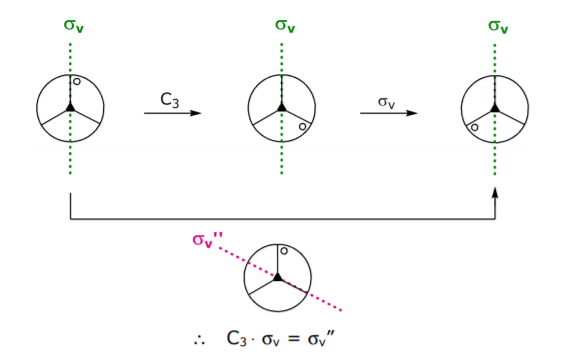
Consider the operators C3 and σv. These do not constitute a group because identity criterion is not satisfied. Do E, C3, σv form a group? To address this question, a stereographic projection (featuring critical operators) will be used:
So how about closure?
C3 ⋅ C3 = C3 2 (so C3 2 needs to be included as part of the group)
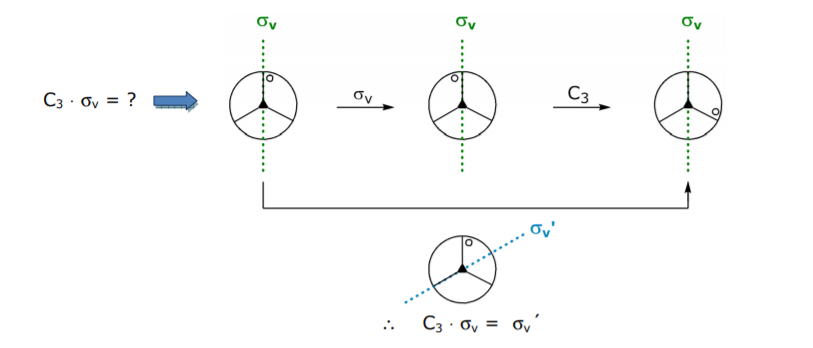
Thus E, C3 and σv are not closed and consequently these operators do not form a group. Is the addition of C3 2 and σv´ sufficient to define a group? In other terms, are there any other operators that are generated by C3 and σv?
… the proper rotation axis, C3:
\(C_{3}\)
\(C _{3} \cdot C _{3}= C _{3}^{2}\)
\(C _{3} \cdot C _{3} \cdot C _{3}= C _{3}^{2} \cdot C _{3}= C _{3} \cdot C _{3}^{2}= E\)
\(C _{3} \cdot C _{3} \cdot C _{3} \cdot C _{3}= E \cdot C _{3}= C _{3}\)
etc.
\(\therefore C _{3}\) is the generator of \(E , C _{3}\) and \(C _{3}^{2}\), note: these three operators form a group
… for the plane of reflection, σv
\(\sigma_{v}\)
\(\sigma_{v} \cdot \sigma_{v}=E\)
\(\sigma_{v} \cdot \sigma_{v} \cdot \sigma_{v}=E \cdot \sigma_{v}=\sigma_{v}\)
etc.
So we obtain no new information here. But there is more information to be gained upon considering C3 and σv. Have already seen that C3 ⋅ σv = σv’ … how about σv ⋅ C3
Will discover that no new operators may be generated. Moreover one finds
\(\begin{array}{ccccccc} & E ^{-1} & C _{3}^{-1} & \left( C _{3}^{2}\right)^{-1} & \sigma_{ v }^{-1} & \left(\sigma_{ v }^{\prime}\right)^{-1} & \left(\sigma_{ v }^{\prime \prime}\right)^{-1} \\ \text {inverses } & \downarrow & \downarrow & \downarrow & \downarrow & \downarrow & \downarrow \\ & E & C _{3}^{2} & C _{3} & \sigma_{ v } & \sigma_{ v }^{\prime} & \sigma_{ v }^{\prime \prime}\end{array}\)
The above group is closed, i.e. it contains the identity operator and meets inverse and associativity conditions. Thus the above set of operators constitutes a mathematical group (note that the group is not Abelian).
Some definitions:
Operators C3 and σv are called generators for the group since every element of the group can be expressed as a product of these operators (and their inverses).
The order of the group, designated h, is the number of elements. In the above example, h = 6.
Groups defined by a single generator are called cyclic groups.
Example: C3 → E, C3, C3 2
As mentioned above, E, C3, and C32 meet the conditions of a group; they form a cyclic group. Moreover these three operators are a subgroup of E, C3, C3 2, σv, σv’,σv”. The order of a subgroup must be a divisor of the order of its parent group. (Example hsubgroup = 3, hgroup = 6 … a divisor of 2.)
A similarity transformation is defined as: v -1 ⋅ A ⋅ ν = B where B is designated the similarity transform of A by x and A and B are conjugates of each other. A complete set of operators that are conjugates to one another is called a class of the group.
Let’s determine the classes of the group defined by E, C3, C3 2 , σv, σv’,σv”… the analysis is facilitated by the construction of a multiplication table
\[\begin{array}{l|llllll}
& E & C _{3} & C _{3}^{2} & \sigma_{ v } & \sigma_{ v }^{\prime} & \sigma_{ v }^{\prime \prime} \\
\hline E & E & C _{3} & C _{3}^{2} & \sigma_{ v } & \sigma_{ v }^{\prime} & \sigma_{ v }^{\prime \prime} \\
C _{3} & C _{3} & C _{3}^{2} & E & \sigma_{ v }^{\prime} & \sigma_{ v }^{\prime \prime} & \sigma_{ v } \\
C _{3}^{2} & C _{3}^{2} & E & C _{3} & \sigma_{ v }^{\prime \prime} & \sigma_{ v } & \sigma_{ v }^{\prime} \\
\sigma_{ v } & \sigma_{ v } & \sigma_{ v }^{\prime \prime} & \sigma_{ v }^{\prime} & E & C _{3}^{2} & C _{3} \\
\sigma_{ v }^{\prime} & \sigma_{ v }^{\prime} & \sigma_{ v } & \sigma_{ v }^{\prime \prime} & C _{3} & E & C _{3}^{2} \\
\sigma_{ v }^{\prime \prime} & \sigma_{ v }^{\prime \prime} & \sigma_{ v }^{\prime} & \sigma_{ v } & C _{3}^{2} & C _{3} & E
\end{array}\]
may construct easily using stereographic projections
\(E ^{-1} \cdot C _{3} \cdot E = E \cdot C _{3} \cdot E = C _{3}\)
\(C _{3}^{-1} \cdot C _{3} \cdot C _{3}= C _{3}^{2} \cdot C _{3} \cdot C _{3}= E \cdot C _{3}= C _{3}\)
\(\left( C _{3}^{2}\right)^{-1} \cdot C _{3} \cdot C _{3}^{2}= C _{3} \cdot C _{3} \cdot C _{3}^{2}= C _{3} \cdot E = C _{3}\)
\(\sigma _{ v }^{-1} \cdot C _{3} \cdot \sigma_{ v }=\sigma_{ v } \cdot C _{3} \cdot \sigma_{ v }=\sigma_{ v } \cdot \sigma_{ v }^{\prime}= C _{3}^{2}\)
\(\left(\sigma_{ v }^{\prime}\right)^{-1} \cdot C _{3} \cdot \sigma_{ v }^{\prime}=\sigma_{ v }^{\prime} \cdot C _{3} \cdot \sigma_{ v }^{\prime}=\sigma_{ v }^{\prime} \cdot \sigma_{ v }^{\prime \prime}= C _{3}^{2}\)
\(\left(\sigma_{ v }^{\prime \prime}\right)^{-1} \cdot C _{3} \cdot \sigma_{ v }^{\prime \prime}=\sigma_{ v }^{\prime \prime} \cdot C _{3} \cdot \sigma_{ v }^{\prime \prime}=\sigma_{ v }^{\prime \prime} \cdot \sigma_{ v }= C _{3}^{2}\)
∴ C3 and C3 2 from a class
Performing a similar analysis on σv will reveal that σv, σv’ and σv’’ form a class and E is in a class by itself. Thus there are three classes:
\(E ,\left( C _{3}, C _{3}^{2}\right),\left(\sigma_{ v }, \sigma_{ v }^{\prime}, \sigma_{ v }^{\prime \prime}\right)\)
Additional properties of transforms and classes are:
- no operator occurs in more than one class
- order of all classes must be integral factors of the group’s order
- in an Abelian group, each operator is in a class by itself.